发布时间: 2025-07-29 10:21:44来源:智车行家
未来,随着消费机器人、工业机器人的普及,以及人形机器人在产品选代和场景落定上的进展加速,我们预计机器人场景对激光雷达等光学环节的需求将指数级攀升。
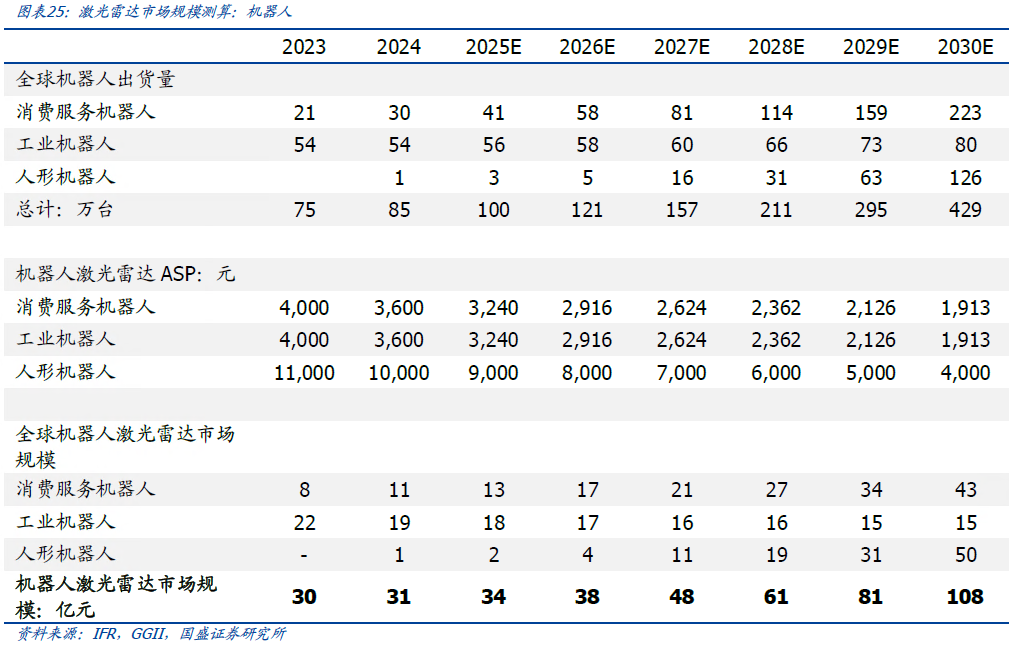
机器人出货量:按照 IFR 统计,2023年消费服务类机器人(含专用、医用等)出货约 21.1万台,工业机器人出货量约54.1万台。按GGII统计和预测,2024年人形机器人出货望达 1.2万台,至2026年望超5万台。
激光雷达 ASP:由于机器人赛道尚属早期,当前针对机器人的激光雷达单机价值量亦差异显著,我们判断从千元至数万元不等。我们预计随着机器人赛道日益选代,激光雷达在规格日益提升和精准的同时,均价亦将体现规模效应。市场规模:量价相乘,我们预计机器人激光雷达市场规模至 2030年有望达百亿人民币级别。
01
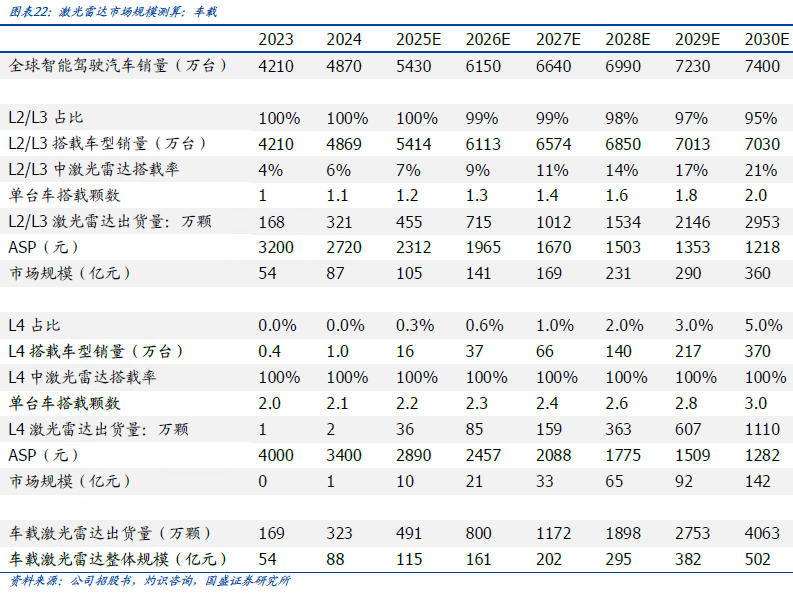
随着智驾等级的提升、激光雷达成本的下降,我们认为激光雷达大规模量产的时代刚刚开始。仅看车载激光雷达硬件,我们简单测算预计 2030 年市场规模可超 500 亿元。
自动驾驶汽车(含ADAS、或具有自动驾驶功能设计的汽车):按照灼识咨询预测的自动驾驶汽车销量,从2023 至2030 年,自动驾驶汽车的销量或有望从 4210 万台增长至7400 万台。自动驾驶级别:我们假设至2030 年,L4 级别约占以上口径自动驾驶汽车比例的约5%。L2/L3 级别约占 95%。
激光雷达搭载率:我们假设至2030 年,L2/L3 级别辅助驾驶汽车的激光雷达搭载率约21%,而L4 级自动驾驶汽车的激光雷达搭载率为 100%。单车激光雷达搭载颗数:我们假设至2030 年,L2/L3 级别辅助驾驶汽车的激光雷达平均搭载颗数约2 颗,而 L4 级自动驾驶汽车的激光雷达平均搭载颗数约3 颗。
价格:我们假设至2030 年,L2/L3 级别辅助驾驶汽车的激光雷达ASP 约下降至1200元左右,而L4 级自动驾驶汽车的激光雷达ASP 趋势类似。市场规模:量价相乘,我们预计 2030 年全球车载激光雷达市场规模大约为 500 亿元,其中 L2/L3 级别 ADAS 激光雷达约 360 亿元、L4 级别用途激光雷达约 142 亿元。
02
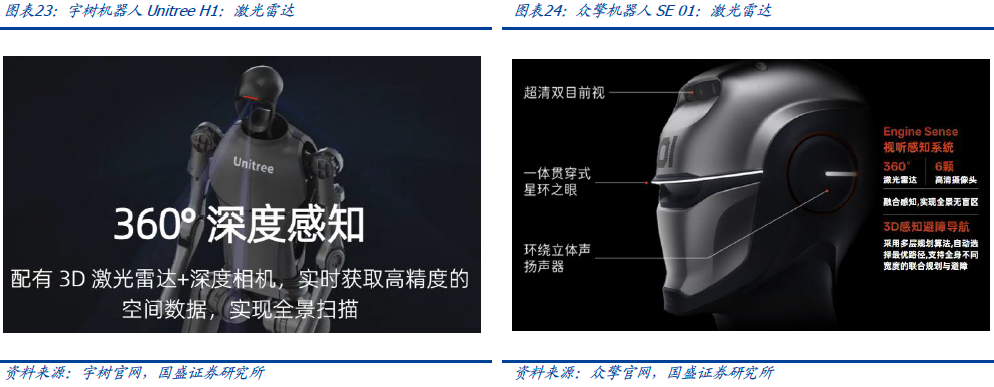
当前,工业场景、消费服务场景、人形机器人等出货量大幅增长。对消费机器人、工业机器人、以及迭代中的人形机器人而言,视觉系统都是感知的核心环节。不同的机器人主机厂配置的视觉系统略有差别,但主要由摄像头、深度相机、以及激光雷达构成。
以宇树Unitree H1 人形机器人为例,其搭载了由“深度相机+3D 激光雷达”构成的视觉硬件系统。以众擎SE01 机器人为例,其搭载了“6 颗摄像头+3D 感知避障导航+360 度激光雷达”的多传感器融合感知系统。
未来,随着消费机器人、工业机器人的普及,以及人形机器人在产品迭代和场景落定上的进展加速,我们预计机器人场景对激光雷达等光学环节的需求将指数级攀升。
机器人出货量:按照IFR 统计,2023 年消费服务类机器人(含专用、医用等)出货约21.1 万台,工业机器人出货量约 54.1 万台。按GGII 统计和预测,2024 年人形机器人出货望达1.2 万台,至2026 年望超 5 万台。
激光雷达 ASP:由于机器人赛道尚属早期,当前针对机器人的激光雷达单机价值量亦差异显著,我们判断从千元至数万元不等。我们预计随着机器人赛道日益迭代,激光雷达在规格日益提升和精准的同时,均价亦将体现规模效应。
市场规模:量价相乘,我们预计机器人激光雷达市场规模至 2030 年有望达百亿人民币级别。
03
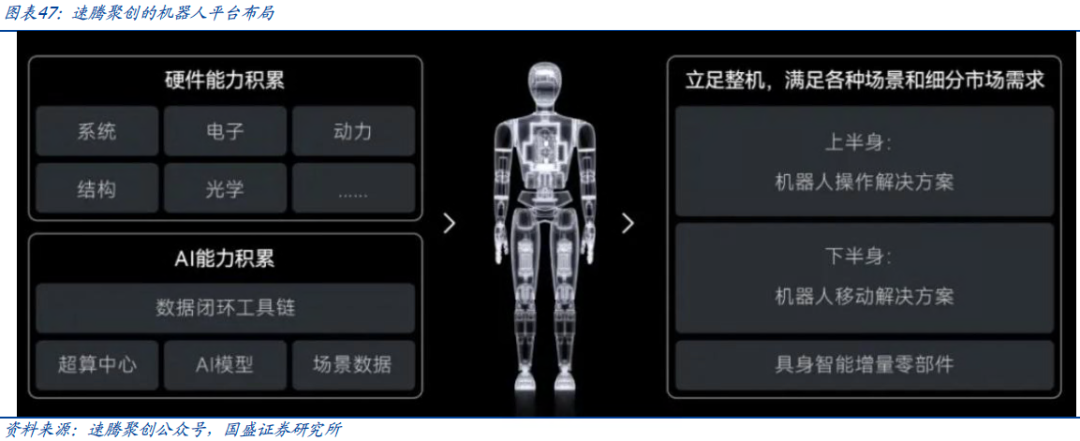
在具身智能大背景下,速腾聚创将自身定位为“机器人增量零部件与解决方案提供商”,立足整机开发通用的机器人移动及操作解决方案,并推出适用于各类场景的智能机器人增量零部件。在2025 年初的AI 机器人发布会上,速腾聚创推出了其面向机器人第二个十年的一系列产品:
机器人视觉方案Active Camera
第二代灵巧手Papert 2.0
力传感器FS-3D
高功率密度直线电机LA-8000
机器人域控制器DC-G1
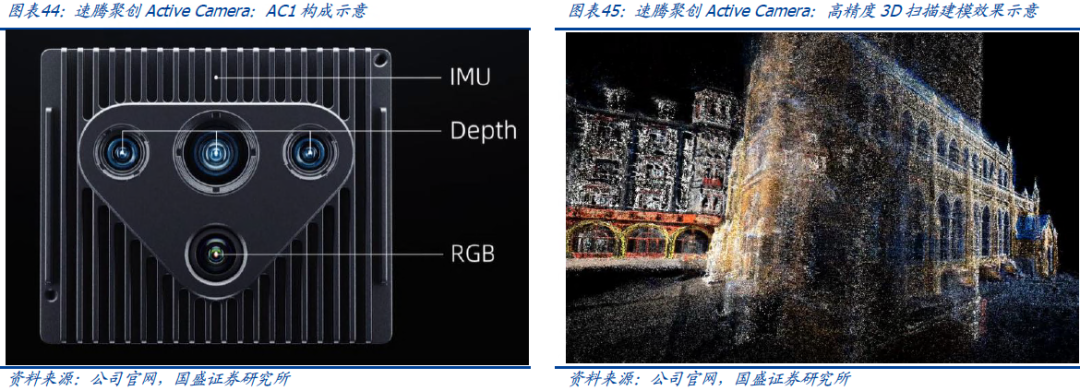
以Active Camera 为例,其首款产品AC1 集成了IMU、深度相机、RGB 相机等,提供深度信息、图像信息、运动姿态信息的硬件级融合。AC1 最远测距约70 米,10%反射率下测距达20 米。其测距精度为3cm @1σ,且精度不会随距离增加而衰减,让机器人实现准确的路径规划。120°×60°的超大深度 FOV 与 144°×78°的超大色彩 FOV 融合,覆盖面积更大。因此,AC1 可以广泛应用于需要深度、色彩、运动姿态信息融合的各类场景,包括但不限于人形机器人、工业机器人、仓储机器人、无人机等等。

再以速腾聚创灵巧手 Papert 2.0 为例,其仿人手设计,具有 20 个自由度,最大负载五千克,可以完成使用电动螺丝刀、拿鸡蛋、捡螺丝钉、抬起重物等等多项任务。结合公司在视觉上的积累,Papert 2.0 可以将感知信息和手部动作闭环起来,开发出丰富的场景应用。
04
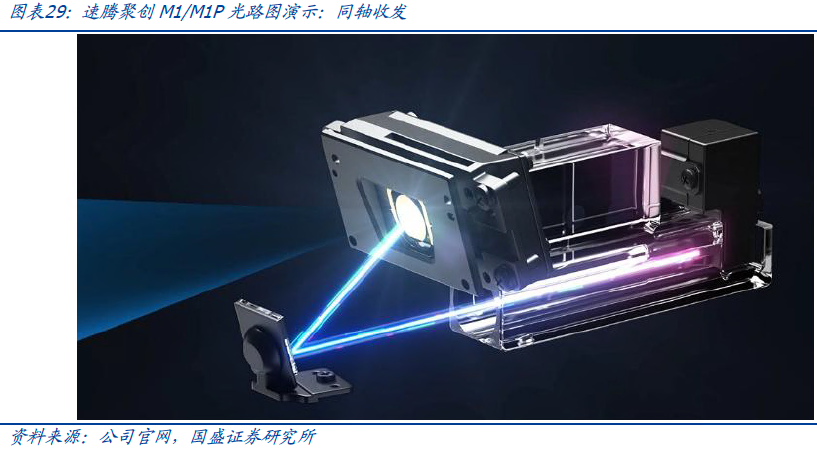
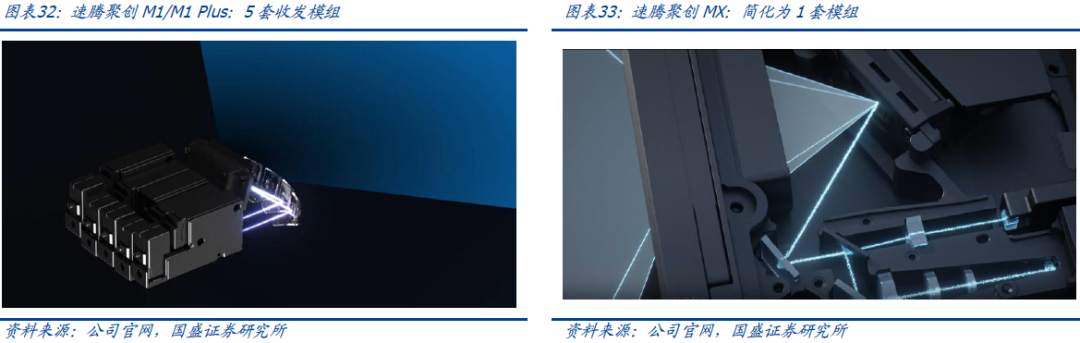
速腾聚创M1/M1 Plus 的工作原理是:其拥有并列的5 套收发模组、对应的5 面反射镜、以及1 个位于中央的MEMS 振镜。
发射和接收模块:
✓ 每套发射组件中,由 EEL 激光器发射出 905nm 点光源,到达反射镜后,第一次反射至MEMS 振镜、再第二次反射发射至外部环境。
✓ 接收模组中,返回光先到达MEMS 振镜,经过第一次反射到达5 个反射镜,经过第二次反射后回到接收模组中的SiPM 探测器。
M1/M1P 采用同轴收发,发射光路和返回光路的路径基本一致。从架构上看,其 5 套收发模组在水平方向上并列、多通道联合扫描并拼接起来、最终实现120°x25°的视场角。同时,其动态提高ROI 区域垂直分辨率至0.1°,更早看清远处障碍物,让车辆提前响应。
扫描模块:采用二维MEMS 振镜,通过悬臂梁围绕横纵两轴、进行高速的二维周期运动,从而改变激光反射方向,实现扫描。
我们认为,公司激光雷达的产品壁垒体现在多个方面:
光学器件及架构优化能力,
芯片迭代能力,
软硬件协同及数据处理能力,
产能及良率提升的能力,等。
4.1 光学器件及架构优化
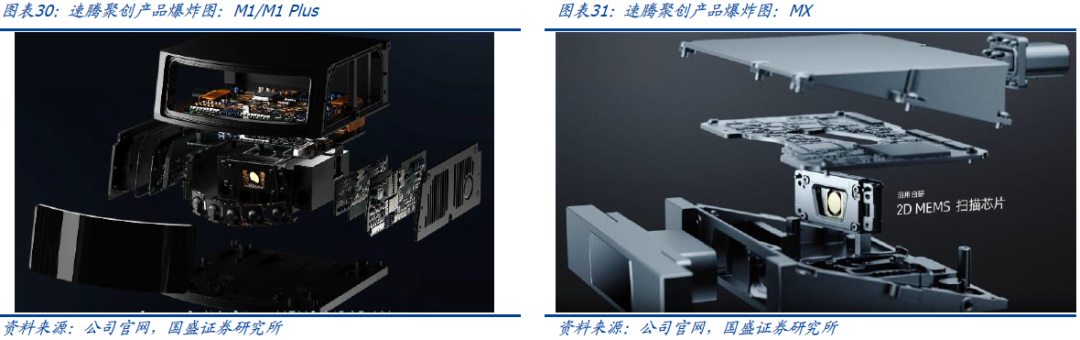
随着产品技术的迭代,我们看到速腾聚创 M 系列产品中从 M1/M1P 到 MX,其架构产生了大量的优化和简化。其中,尤其以收发模组架构、芯片化的迭代更为明显。
在收发模组端:
因为单套收发模组的扫描角度有限,因此 M1/M1P 采用的扩角方式是5 套收发模组水平并列、拼接起来形成较大的FOV。
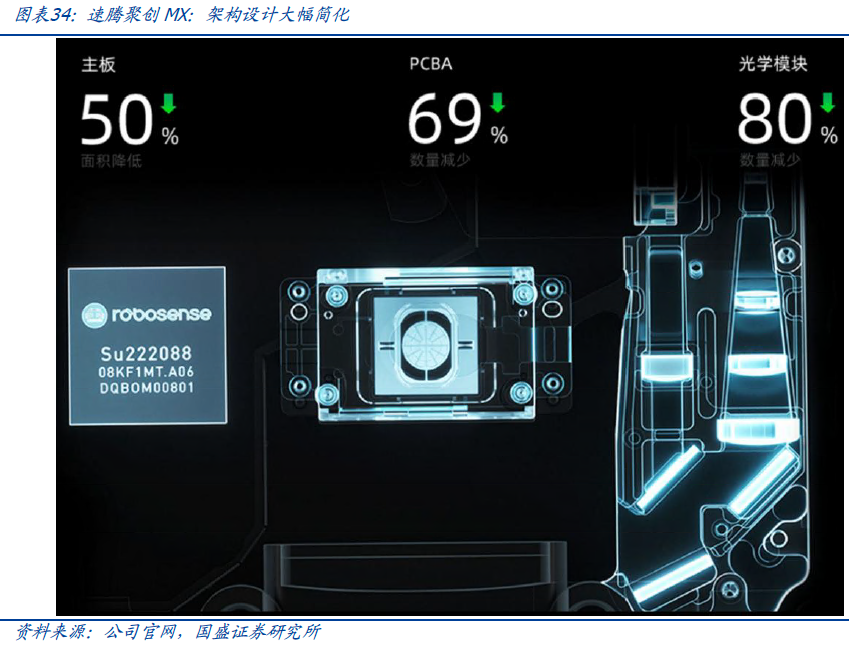
而我们从 MX 的官网介绍可以看出,MX 将光学模块数量减少了 80%至 1 个。通过光学设计,完成了单个模组的扩角。这既消除了多模组的点云拼接痕迹问题,也大幅降低了光学器件成本、可制造性大幅提升。
4.2 芯片迭代能力
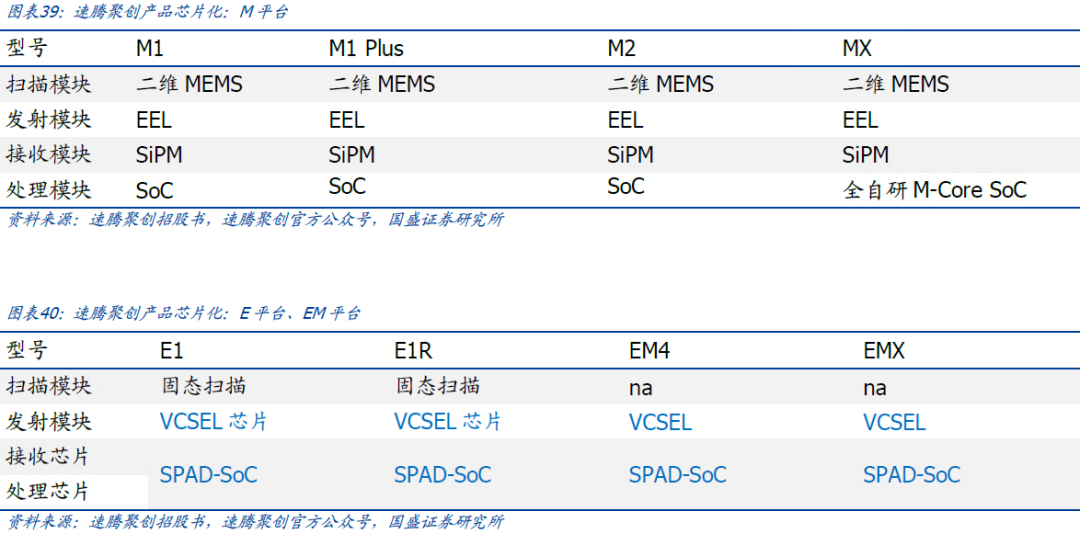
在芯片化维度,速腾聚创顺利推出处理芯片M-Core,且在激光雷达的扫描、发射、接收等环节均完成了相应的芯片探索和布局。

扫描端:早在 2023 年初,速腾聚创的 MEMS 振镜模组就获得了 AEC-Q100 认证。根据速腾聚创官方公众号,MEMS 振镜是光学MEMS 执行器芯片,可以在驱动作用下对激光光束进行偏转、调制、开启闭合及相位控制。在超过 4400 个 MEMS 振镜模组测试验证样本量的投入下,速腾聚创 MEMS 振镜模组通过了严苛的 AEC-Q100认证,将首款车规级二维MEMS 芯片引入M 平台激光雷达。

发射端:速腾聚创开发出业内第一款二维 VCSEL 驱动芯片,采用二维可寻址面阵VCSEL 技术,支持灵活的扫描模式。
接收端:速腾聚创推出了SPAD-SoC,采用先进的3D 堆叠工艺,把接收SPAD 和处理SoC 融合在一颗芯片里,在片上实现点云前处理和后处理。

去年11 月,速腾聚创官宣全自研 SoC 芯片 M-Core 通过AEC-Q100 车规级可靠性认证。根据速腾聚创官方公众号,M-Core 将整个激光发射控制、接收信号处理、MEMS 控制、后端电路和DDR 芯片集成至单颗芯片,可以同时实现发射控制、扫描控制、信号处理、点云生成等众多功能;在大幅提升运算处理能力的同时,将电路板面积优化 50%。 高集成、强自研、低功耗、小体积,使得速腾聚创的激光雷达产品在性能提升的同时,成本大幅降低。
4.3 软硬件协同及数据处理能力
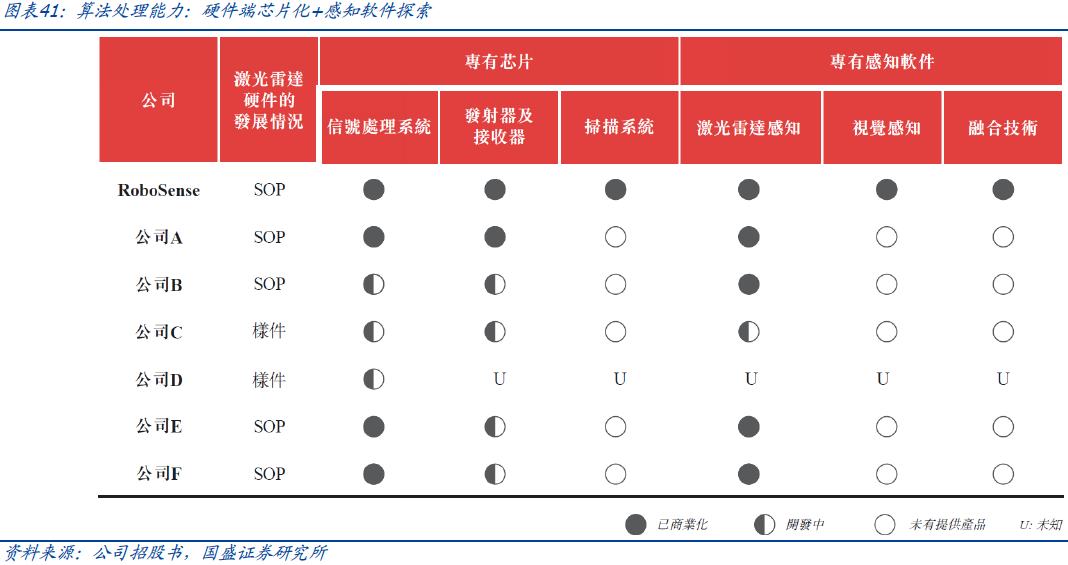
算法和数据处理能力也是速腾聚创的重要竞争力之一:
从硬件协同的角度:通过对激光雷达自研芯片的探索,一方面,在发射端,速腾聚创采用二维可寻址面阵 VCSEL 技术,扫描方式灵活,提升能量利用率。另一方面,公司在接收端SPAD-SoC 上把接收SPAD 和处理SoC 融合在一颗芯片里,直接生成三维点云。
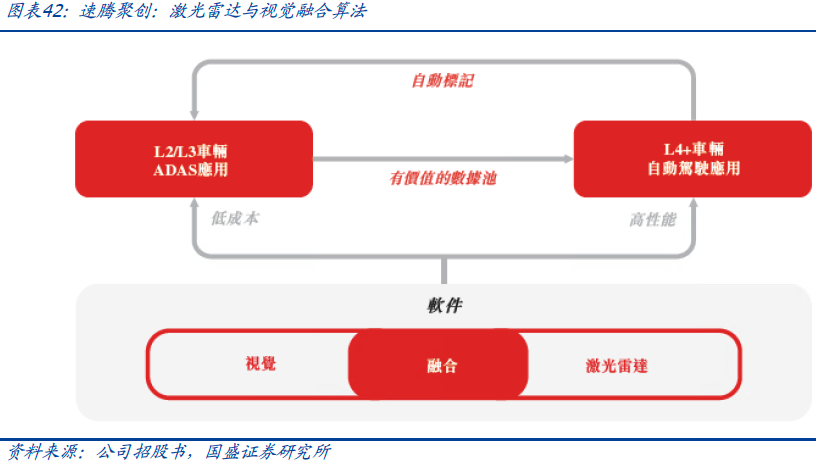
从软件方案的角度:速腾聚创积极打造多传感器融合感知软件。公司打造了HyperVision 2.0,一套将视觉的图像数据和激光雷达的点云数据的强融合的感知解决方案。HyperVision 2.0 提供支持目标感知、环境感知、预测决策、运动规划等的全栈式算法,可以支持1)ADAS 纯视觉、2)ADAS 视觉+激光雷达、3)自动驾驶视觉+激光雷达等不同的解决方案。
05
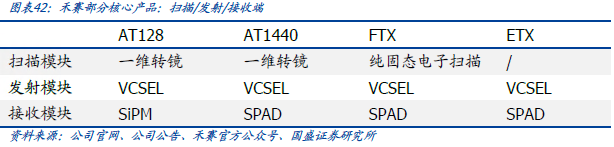
适用于ADAS 场景的激光雷达产品包括:AT 系列(如AT128、ATX 等)、FT系列(如 FT120、FTX 等)、ET 系列(如ETX 等);
Robotaxi:适用于robotaxi 场景的激光雷达产品包括:Pandar 系列、QT 系列、OT系列;
机器人:适用于机器人场景的激光雷达产品包括:XT 系列、JT 系列等。
荣获中国割草机器人行业激光雷达引领者认证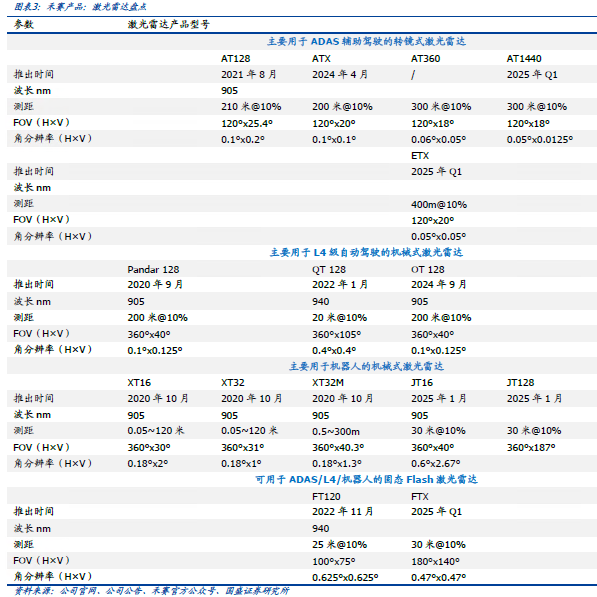
2025 年 7 月,禾赛荣获中国智能科技创新产业第三方数据统计与咨询分析机构 CETA Research(CETA 咨询)颁发的 “中国割草机器人行业激光雷达引领者” 地位确认证书。
JT 系列是禾赛专为机器人和工业领域设计的迷你型超半球 3D 激光雷达,具备超广的 360° x 189° 超半球视野,提供无盲区的感知效果,外形比同类产品体积小 70%,可轻松嵌入于各类机器人和工业设备,以提供全面的三维感知。 禾赛 JT 系列已在割草机器人市场取得显著突破,凭借小巧的体型和卓越的三维环境感知能力,让智能割草机轻松完成建图、精确定位与灵敏避障,全面升级草坪作业体验。2025 年 4 月,禾赛与高端智能庭院品牌 MOVA 签署战略合作协议,未来一年内将提供 30 万台 JT 系列激光雷达,助力 MOVA 割草机器人实现技术突破。
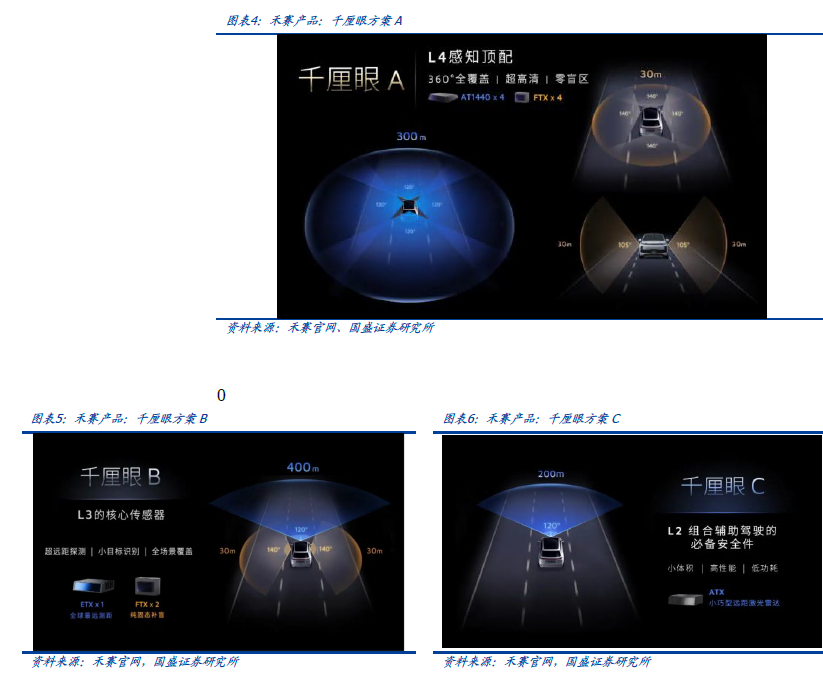
2025 年 4 月,禾赛发布面向L2 到L4 的 “千厘眼”系列感知方案。千厘眼系列是禾赛基于不同的激光雷达组合推出的面向不同场景的感知方案:
千厘眼 A:面向L4 级的自动驾驶感知方案。包含:AT1440 x4 + FTX x4
千厘眼 B:面向L3 级的智能驾驶感知方案。包含:ETX x1 + FTX x2
千厘眼 C:面向L2 级的辅助驾驶感知方案。包含:ATXx1
千厘眼系列面向不同的智能驾驶条件,提供高性能、全场景覆盖的激光雷达传感器方案。
禾赛在 ADAS、自动驾驶、机器人等场景,凭借卓越的技术实力和量产交付能力,获得了海内外汽车制造商、robotaxi 和机器人企业等认可。公司与理想、小米、长安、长城、零跑、比亚迪、极氪等车企,以及文远知行、MOVA 等 robotaxi 和服务机器人企业建立了紧密的合作关系。

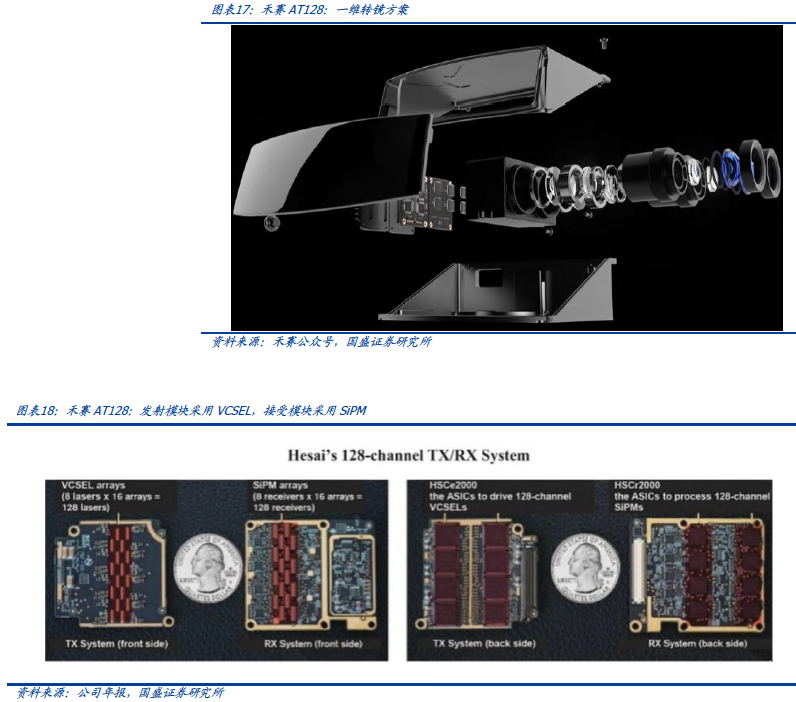
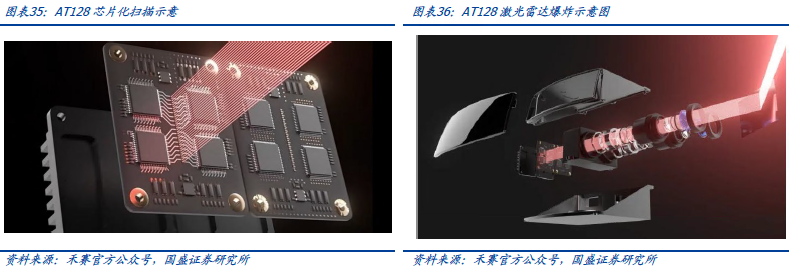
以禾赛用于 ADAS 的拳头产品AT128 为例:
发射模块:禾赛采用芯片化技术在内部的垂直方向上集成了 128 个独立激光器。其在发射端采用Lumentum 的 VCSEL (垂直腔面发射激光器)阵列,在垂直方向上排布、实现固态电子扫描。
接受模块:禾赛采用 SiPM(硅光电倍增管)来进行激光的接收。
扫描模块:VCSEL 的垂直排布架构使得 AT128 的全局扫描不需要借助复杂的二维机械运动模块来实现、仅需简单可靠的一维转镜架构即可。
05
在自动驾驶领域,车载传感器的选择是影响系统安全性的关键因素之一。纯视觉方案虽然在大多数情况下能够有效感知车辆环境,但其依赖于光照环境和样本的训练,在极端光照环境、以及未经训练的样本情况等 corner cases 中,对障碍物识别不够即时和准确。因此,激光雷达作为安全冗余,可在纯视觉方案失效时提供关键的补充感知能力。
极端光照环境
✓ 强光、逆光和眩光情形
由于光线的反射、过曝或眩光效应,纯视觉系统在强光条件下容易丧失感知能力。而激光雷达通过主动发射激光并接收回波获取目标信息,不依赖于外界光照或目标的辐射特性。从而保障了感知的稳定性与精度。
✓ 黑夜及弱光环境
传统视觉依赖光信号进行图像捕捉,但在黑夜或弱光环境中,光线的衰减导致图像信噪比急剧下降,影响目标的识别精度。而与强炫光环境同理,激光雷达在低光环境中的表现也通常优于纯视觉系统。

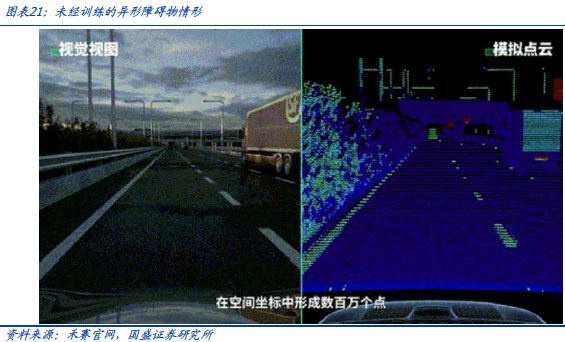
未经训练的异形障碍物识别
视觉系统依赖于大量的训练数据;对于训练集中包含的对象,系统可以准确识别。然而,对于一些未经过训练的异形障碍物,比如一些不常见的交通参与者,如异形施工道路、不常见的动物等,视觉系统容易发生误判或漏检。2024 年《华尔街日报》发布的报告显示,特斯拉的纯视觉系统在面对未经训练的障碍物——如侧翻的拖车时,容易出现判别失误。
而在激光雷达的加持之下,只要前方有障碍物,激光雷达就可以形成点云数据,所有障碍物所“占用”的物理空间就都能被确定,算法即可排除被占用的不可行驶区域,车辆就可以即时感知和避开。
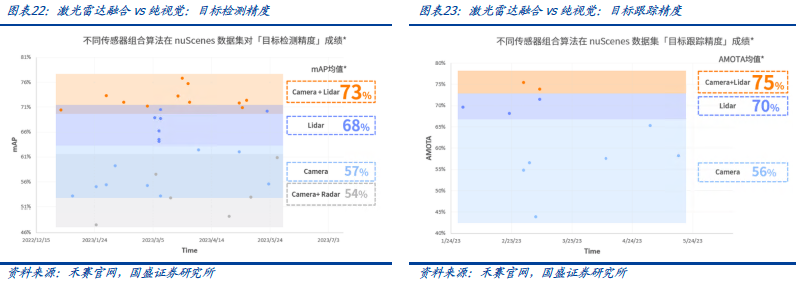
激光雷达作为主动传感器,其可以有效提升对障碍物的目标检测的准确度。禾赛官网显示,在行业权威数据集Nuscenes 感知算法评测中:
1)在目标检测的平均精准度(mean average prevision)指标上,激光雷达+摄像头的组合方案分数相比纯视觉算法的数值平均从 57%提升至73%。
2)基于“ 目标跟踪”任务的 “平均多目标跟踪精度”AMOTA(Average Multi Object Tracking Accuracy)评价数值,在加入激光雷达之后,算法的平均跟踪精度也从 56%提升到了75%。
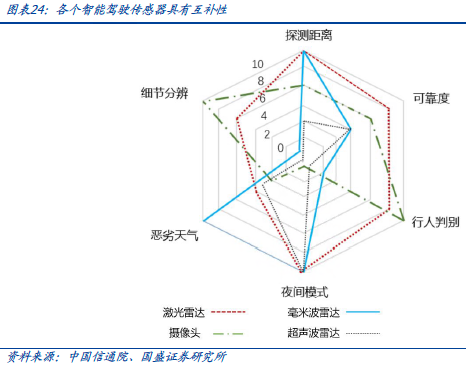
因此,作为主动感知类别的传感器,激光雷达在对于极端光照情况、未经训练的障碍物识别等方面具有突出的能力。在实际运用上,其探测距离、可靠度、行人判别能力和夜间探测能力突出,与其他传感器形成很好的互补。正如禾赛官网所述, “安全”解决的不是99%场景的问题,而是那剩下1%场景的Corner Case 的问题。
3.2.1 芯片自研、架构创新,打通降本路径

我们看到,禾赛一直在性能突破和降本方面持续迭代和创新。
以禾赛 AT128 为例,禾赛采用芯片化技术在内部的垂直方向上集成了 128 个独立激光器。其在发射端采用Lumentum 的垂直腔面发射激光器(VCSEL)阵列,在垂直方向上排布、实现固态电子扫描。这一架构使得AT128 的全局扫描不需要借助复杂的二维机械运动模块来实现、仅需简单可靠的一维转镜架构即可。这一运动频率比其他半固态方案要低至少 30 倍,因此可以实现更高的可靠性、更长的寿命、更低的成本。
ATX 沿用了“芯片化收发+一维扫描”的架构,通过进一步提升收发模块集成度、以及大幅简化核心光学扫描结构,实现更加小巧的设计。相较 AT128,ATX 体积缩小 60%,重量减轻一半至500 克,整机功耗降低55%至8W。
这一设计变化,一方面可以削减物料成本、另一方面也可以大大简化标定、总装等环节,实现更加降本和高效的规模化生产。 此外,禾赛一直致力于激光雷达专用芯片的研发。2024 年,禾赛推出第四代芯片架构,采用 3D 堆叠技术,可单板集成 512 个通道;同时内部嵌入 256 核智能点云解析引擎(IPE),8 核APU,实现每秒 246 亿次采样。禾赛ATX 基于第四代芯片架构研发而成,一方面产品性能参数表现优秀——探测器灵敏度提升 130%、单点测距功能降低 85%,另一方面可以支持二维电子扫描、智能光学变焦等智能功能。

在第四代芯片架构中,禾赛在接收端采用了 SPAD(单光子雪崩二极管)面阵探测器。 SPAD 技术的优势包括:
一方面:对光子的灵敏度极高,在极低光照的条件下也能精准捕捉到微弱的光,因此既有助于激光雷达实现24 小时全天候感知,也有助于实现更极致的测远;
另一方面:具有更高的像素密度,最大限度减少信号噪声。
禾赛从 2020 年开始前瞻布局 SPAD 技术,并在 2023 年底完成了对瑞士芯片设计公司 Fastree 3D 的战略并购,Fastree 3D 拥有大量SPAD 数字激光雷达基础专利。此次并购之后,禾赛将相关 SPAD 专利技术嵌入到自研第四代芯片架构中,打造新一代高性能、低成本的激光雷达产品。 (参考来源:国盛证券研究所)